
■ Caractéristiques de Bases
• couple amélioré, conception compacte
• Durabilité et extensibilité améliorées
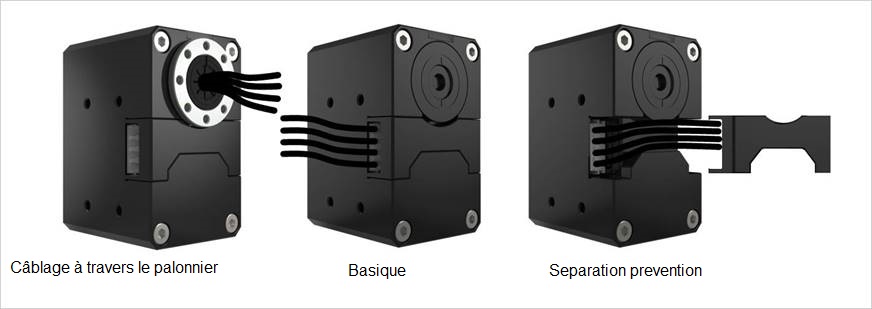
• Emplacement creux réduisant les contraintes du câble (3 possibiltés de câblage)
• Cadres directement vissés sur le boîtier (pas d'écrous nécessaires)
• Dissipateur de chaleur en aluminium amélioré
• 6 modes de fonctionnement
• Contrôle du couple en fonction du courant (4096 pas, 2.69mA / pas)
• Contrôle de profil pour la planification de mouvement lisse
• Données de trajectoire et état de déplacement (en position, suite à une erreur, etc.)
• Moins énergivore (Courant de veille réduit de 100mA à 40mA)
■ Différentes possibilités de Câblage
■ Mots clé
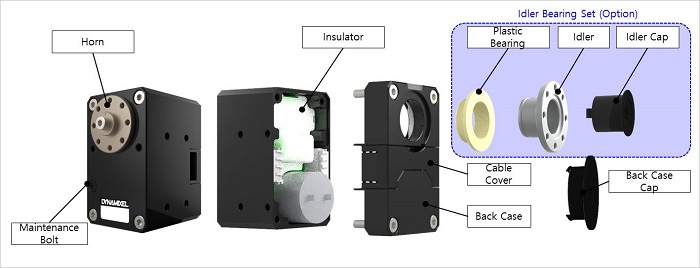
■ Contenu du Kit
|
Description
|
Quantité
|
|
DYNAMIXEL
|
XM430-W210-R
|
1
|
|
Palonnier
|
HN12-N101
|
1
|
|
Rondelle
|
Rondelle en Teflon (pour assemblage du palonnier)
|
1
|
|
Câble
|
Robot Cable-X4P 180mm
|
1
|
|
Robot Cable-X4P (Convertible) 180mm
|
1
|
|
Boulon/Ecrou
|
Boulon (WB M2.5*4) - nécessite clé 6 pans taille 2
|
16
|
|
Boulon (WB M2.5*6) - nécessite clé 6 pans taille 2
|
1
|
|
Boulon (WB M2*3) - nécessite clé 6 pans taille 1.5
|
10
|
|
ETC
|
Spacer ring (entretoise)
|
8
|
■ Caractéristiques
| Modèle |
XM430-W210-R
|
|
Masse (g)
|
82g
|
|
Dimension (mm)
|
28.5 x 46.5 x 34
|
|
Rapport de Transmission
|
212.6 : 1
|
|
Tension d'alimentation (V)
|
11.1
|
12
|
14.8
|
|
Couple de décrochage (N.m)
|
2.7
|
3
|
3.7
|
|
Courant de décrochage (A)
|
2.1
|
2.3
|
2.6
|
|
Vitesse à Vide (RPM)
|
70
|
77
|
95
|
|
|
|
Microcontrôleur
|
ST CORTEX-M3 (STM32F103C8 @ 72MHZ,32BIT)
|
|
Capteur de position
|
Codeur absolu sans contact (12BIT,360°) by AMS
|
|
Moteur
|
Coreless Motor
|
|
Resolution
|
0.088° x 4,096 steps
|
|
Gamme d'opération
|
Mode de contrôle par courant: Rotation infinie
Mode de contrôle par vitesse : Rotation infinie
Mode de contrôle par position : 360[deg]
Mode de contrôle par étendu: ±256[rev]
Mode de contrôle en position par courant : ±256[rev]
Mode de contrôle par PWM : Rotation infinie
|
|
Tension d'entrée (V)
|
10~14.8V (Tension recommandée : 12V)
|
|
Température en fonctionnement
|
-5°C ~ 80°C
|
|
Signal de commande
|
Digital Packet
|
|
Type de Protocole
|
Half duplex Asynchronous Serial Communication (8bit,1stop, pas de parité)
|
|
Lien (physique)
|
RS485 Multi Drop Bus (Daisy Chain)
|
|
Identifiant
|
253 ID (0~252)
|
|
Vitesse de communication
|
9600 bps ~ 4.5 Mbps
|
|
Données accesibles
|
Position, Vitesse, Courant, Realtime tick, Trajectoire, Temperature, Tension d'entrée, etc.
|
|
Matériel
|
Caisson : métallique (avant, milieu)
Plastique Technique (arrière)
Engrenage : intégralement métallique
|
|
Courant de Veille (mA)
|
40
|
■ Paramètres par Défaut
Identifiant : 1
vitesse de communication : 57600bps
* Après achat faire les modifications d'ID, vitesses de communication, etc.
** Interface PC : USB2Dynamixel ou son successeur l'U2D2 (ref : 902-0132-000) pour changer cette vitesse et ID facilement.
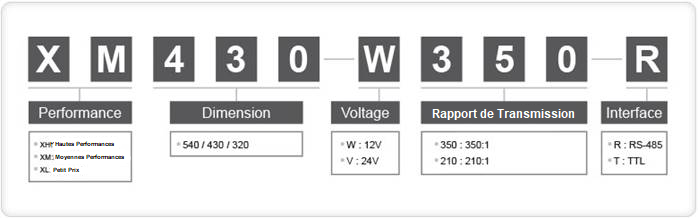
■ Numérotation du Modèle
■ Hyperliens
Charte de compatibilité du cadre, des roulements, du pallonier : Cliquer ici
Charte de compatibilité du Contrôleur : Cliquer ici
Plans mécaniques, SDK, logiciels : cliquer ici
E-Manual : Cliquer ici
■ Avertissement
La serie DYNAMIXEL X adopte un nouveau connecteur JST plaqué or pour des communications fiable et sécurisées.
Pour contrôler la série de servo moteur DYNAMIXEL X via OpenCM ou USB2Dynamixel, utilisez le câble convertible JST-Molex fourni dans le kit.
Pour plus d'informations référez vous à la page compatibilité.
|
Contrôleur / Interface
|
Cable
|
Dynamixel X
|
|
Modèle
|
Support Connecteur :
|
Supports Connectors :
|
Communication
|
|
OpenCM+485 Expansion Board
|
Molex (3P, 4P)
|
Robot Cable-X3P 180mm (Convertible)
|
JST-3P
|
TTL
|
|
USB2Dynamixel
|
|
OpenCR1.0
|
JST (3P, 4P)
|
Robot Cable -X3P (by length)
|
|
U2D2
|
|
OpenCM+485 Expansion Board
|
Molex (3P, 4P)
|
Robot Cable -X4P 180mm (Convertible)
|
JST-4P
|
RS-485
|
|
USB2Dynamixel
|
|
OpenCR1.0
|
JST (3P, 4P)
|
Robot Cable -X4P (by length)
|
|
U2D2
|

 Agrandir
Agrandir























Nous suivre