 Agrandir
Agrandir
- Retirer ce produit de mes favoris
- Ajouter ce produit à mes favoris
- Envoyer à un ami
- Imprimer

Bras Manipulateur RM-X52-TNM
Bras manipulateur open source basé sur ROS.
Agrandir
Bras manipulateur open source basé sur ROS.
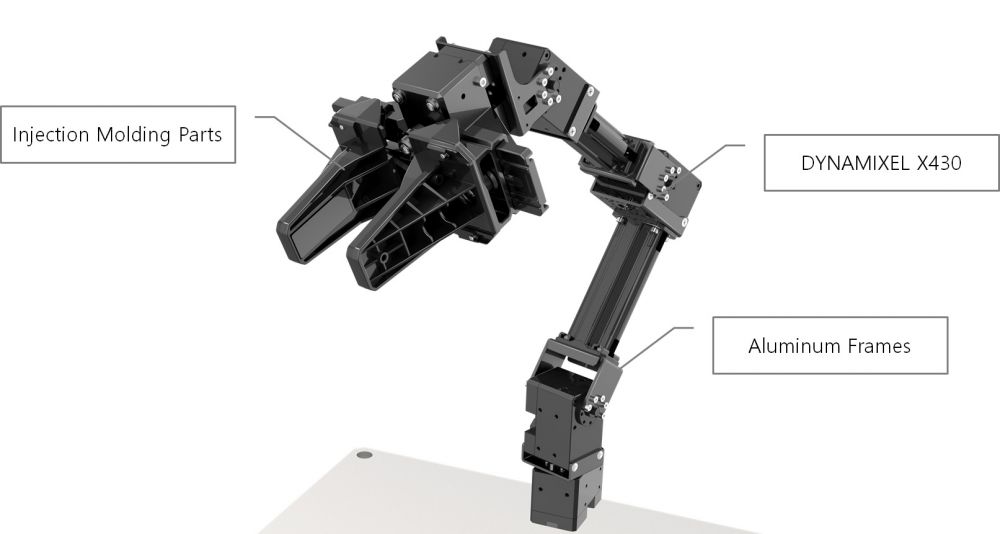
■ Fonctionnalités
Charge utile élevée grâce au servomoteur XM-430
Facile d'utilisation avec un PC et avec les plateformes comme Turtlebot3 Waffle Pi
Codes sources et environnement de développement fournient permettant une utilisation immédiate avec le TB3 Waffle Pi.
Egalement fournit : une variété de logiciels open source ainsi que les fichiers 3D et de CAO utile pour de la recherche et développement.
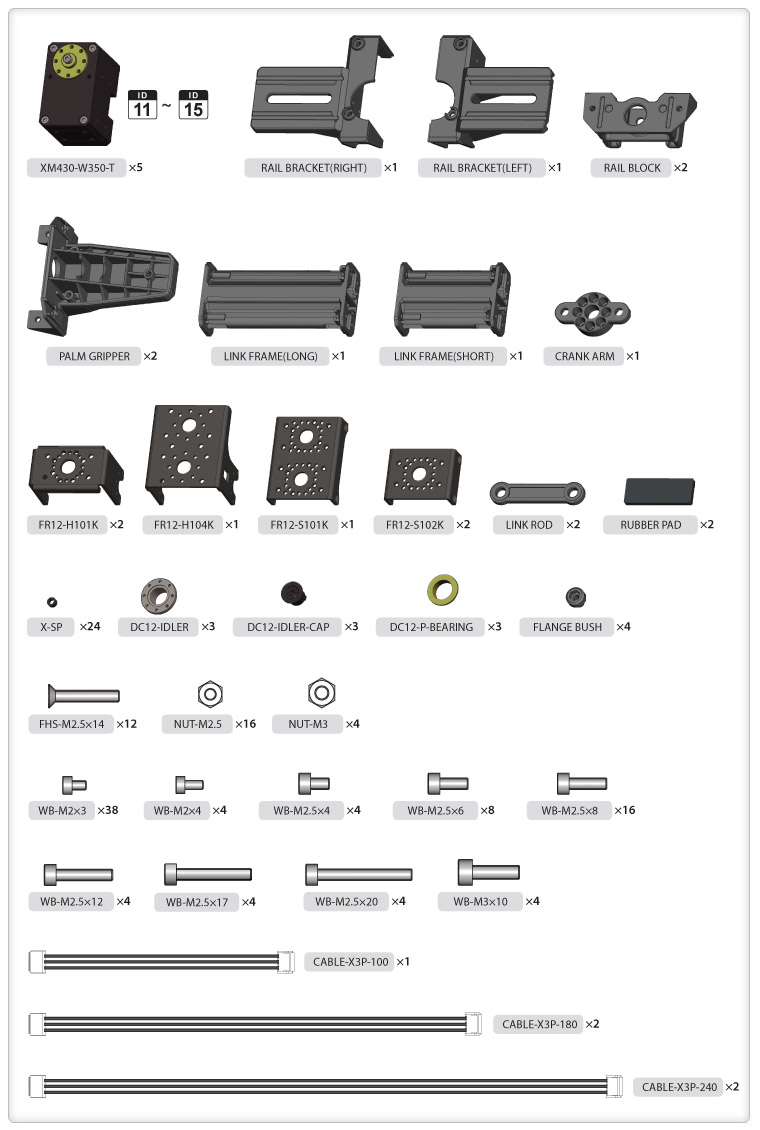
■ Contenu
|
Désignation |
Qté |
|---|---|
|
XM430-W350-T |
5 |
| Exclusive Plastic Frame Set | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| Robot Cable Set X3P (by length) | 5 |
| Bolt & Nut Set | 1 |
| Rubber Pad (Finger Tip) | 2 types x 2 |
| Phillips Screwdriver | 1 |
| Allen Wrench (by type) | 3 |
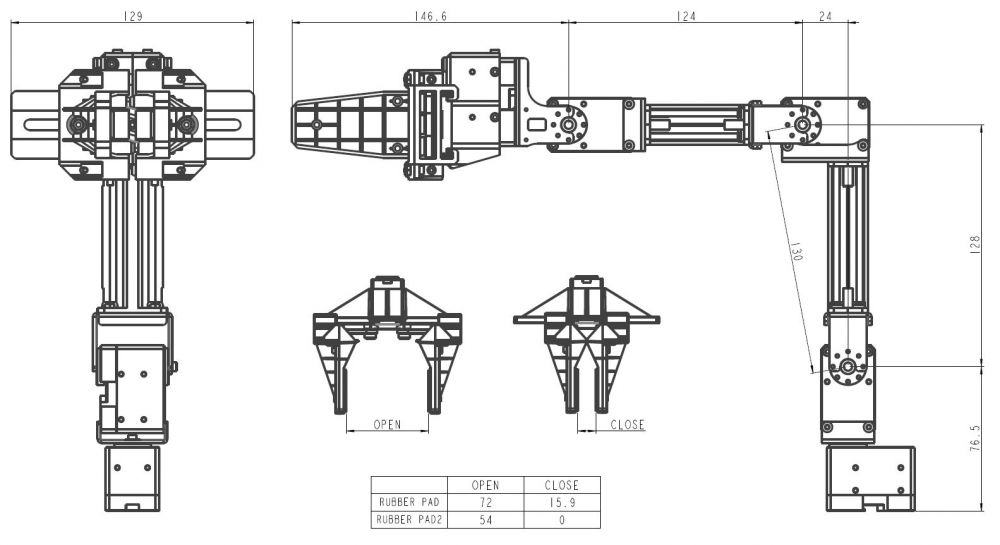
■ Spécifications
| DYNAMIXEL | XM430-W350-T |
|---|---|
| Power Supply (sold separately) | 12V |
| Freedom of degree | 5 (4DOF + 1DOF Gripper) |
| Payload | 500g |
| RPM (joint) | 46RPM |
| Weight (assembly) | 700g |
| Length | 380mm |
| Gripper stroke | 20~75mm |
| Interface | TTL Level Multi Drop BUS |
| Software | ROS. DYNAMIXEL SDK, Arduino, Processing |
| Controller (sold separately) | PC, OpenCR |

■ Vendu séparement
| Power Supply | SMPS 12V 5A |
|---|---|
| Controller | OpenCR or PC |
| Interface | U2D2 |
| Etc. | Base Plate-02 |
■ Attention
contrôleur et alimentation non fournis
compatible avec contrôleur et alimentation du TB3
manuel d'assemblage non fournis, téléchargeable en PDF
le set HN11-I101 est fournis pour être utilisé avec un servomoteur XL430 comme charnière. (XL430 non fournis)
■ liens utiles
Charte de compatibilité du cadre, des roulements, du pallonier : Cliquer ici
Charte de compatibilité du Contrôleur : Cliquer ici
Plans mécaniques, SDK, logiciels : cliquer ici et ici et ici
E-Manual : Cliquer ici
code source : cliquer ici
manuel d'assemblage : Cliquer ici
ROS Wiki : Cliquer ici
Aucun commentaire n'a été publié pour le moment.
Notre service client: lundi au vendredi de 9h à 12h et de 14h à 17h
Tél. :05 62 88 72 72
Contacter notre service client
Aéroparc Saint Martin 12, rue de Caulet - Bat C03 31300 TOULOUSE














Nous suivre