■ Fonctionalités de bases
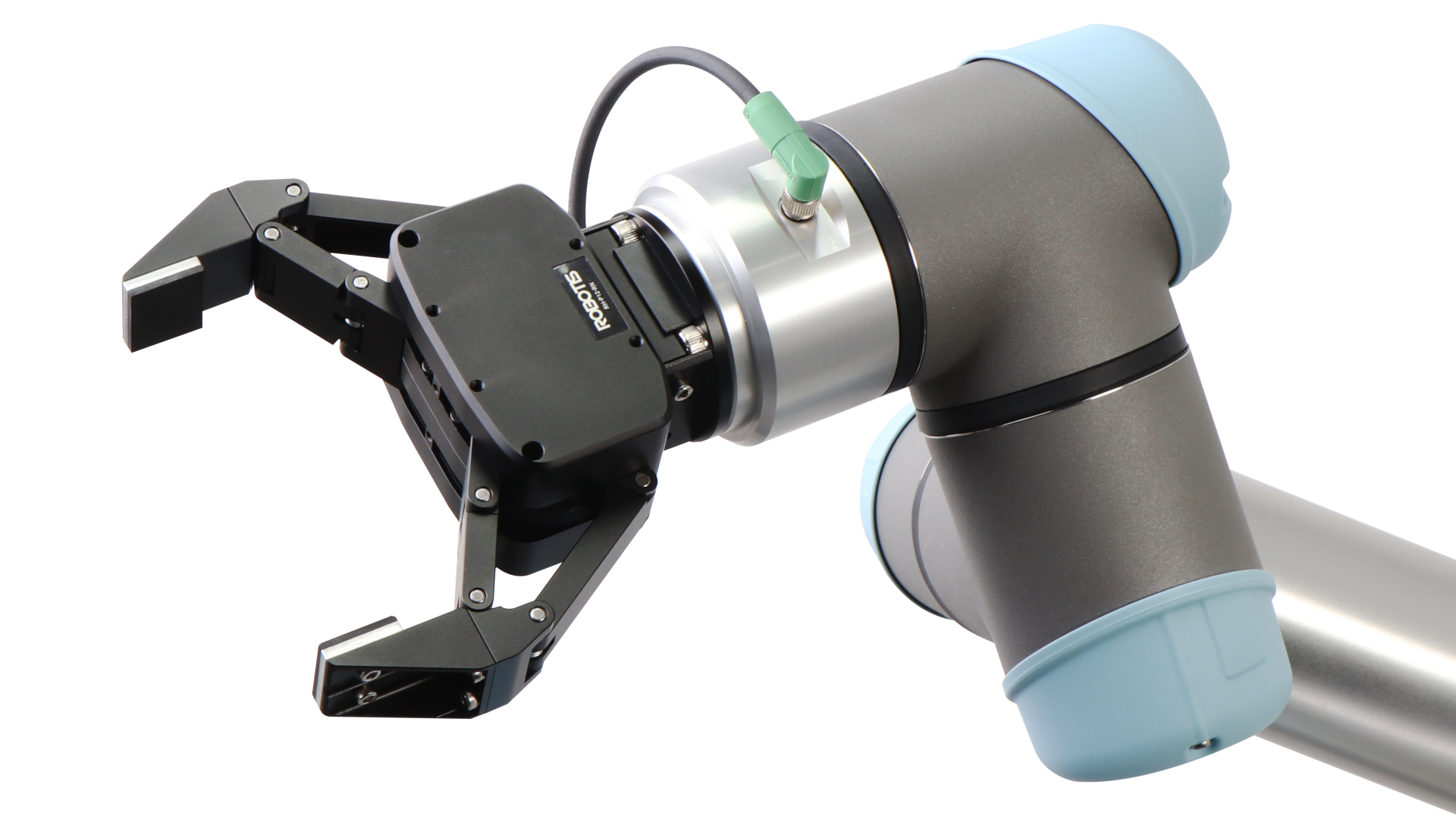
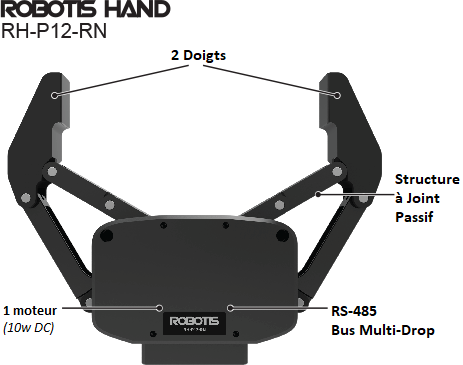
Design Adaptive Gripping
Les joints passifs permettent une agripement adaptif pour différentes formes d'objets.
Contrôle par Courant (Contrôle de Force)
Contrôle précis de la position et du couple basé sur le courant.
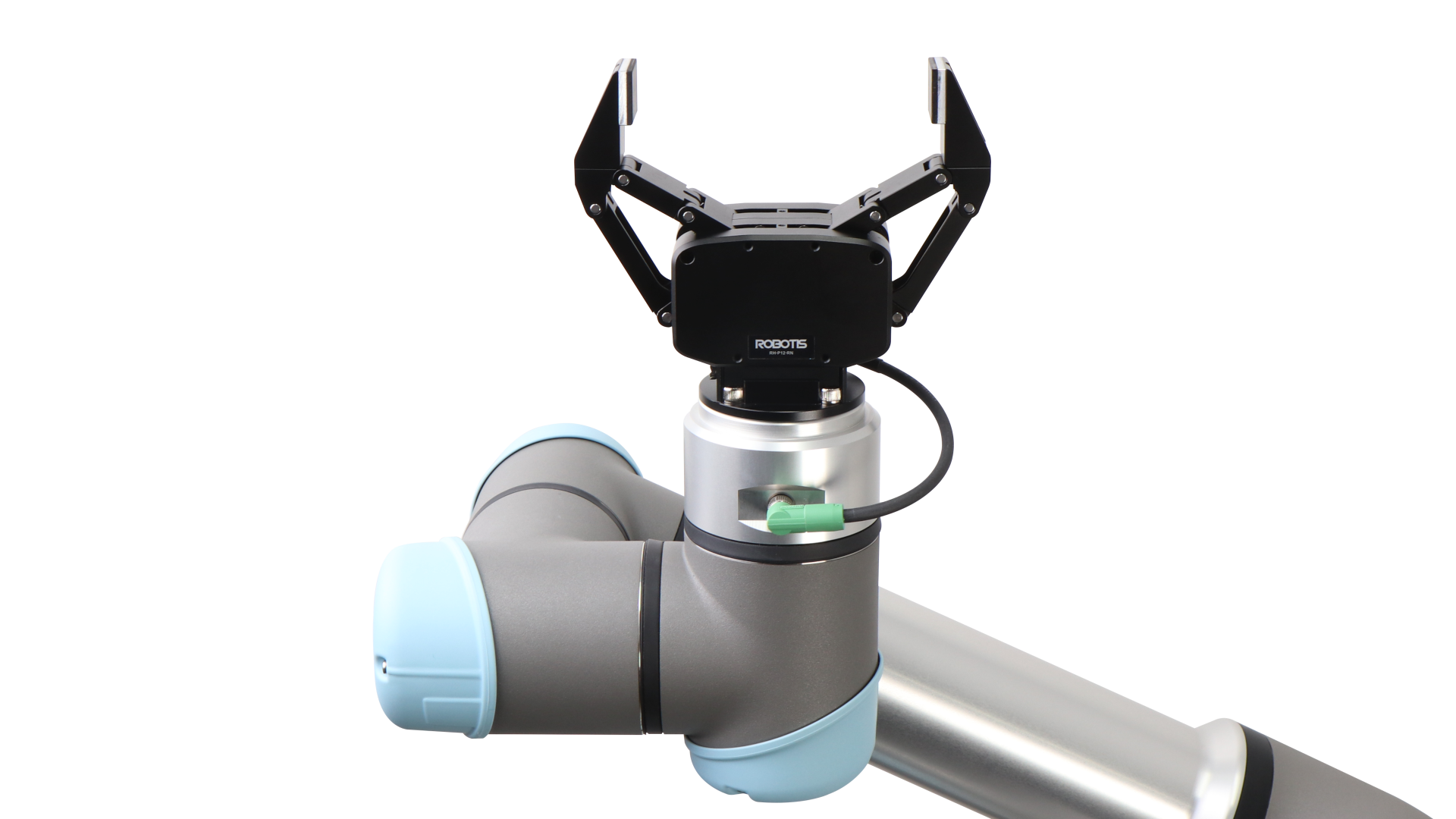
Poids Léger et Haute Puissance
La main robot de 500g peut soulever des masses de 5 kg.
Doigts Détachables
Les doigts sont remplaçable autorisant la personnalisation.
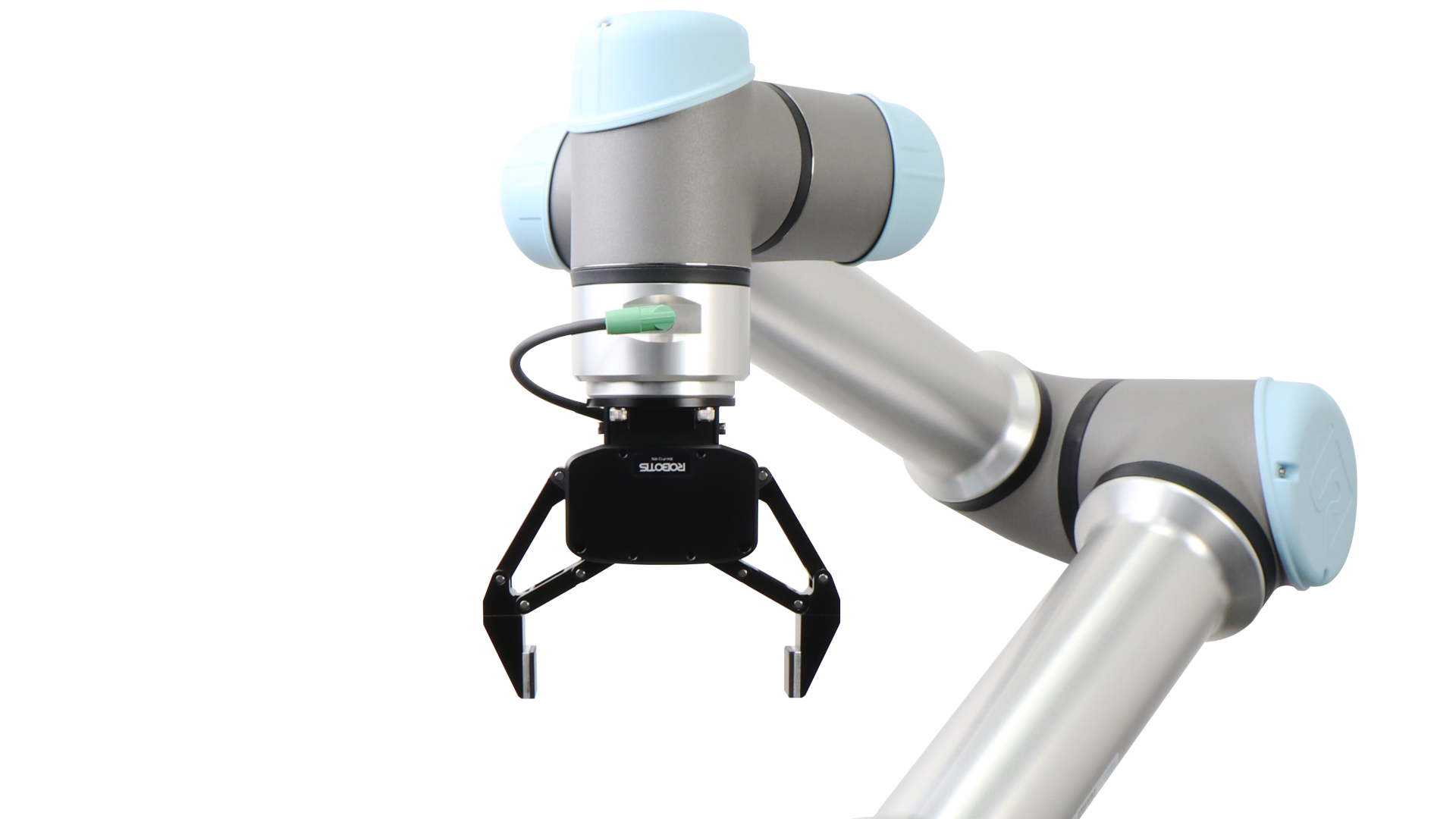
Montage Simple et Intuitif
La main de robot peut être montée rapidement sur ROBOTIS Manipulator.
Le design simplifié permet un montage simple pour des utilisations personnalisées
Protocole Dynamixel 2.0
La main robot supporte le protocole DYNAMIXEL 2.0 pour un contrôle facile.
L'alimentation et la communication sont connectées via le BUS DYNAMIXEL.

■ Contenu du Kit
comprend des composants spécifiques pour la série e des robots UR
|
Description
|
Quantité
|
|
Main Robot
|
RH-P12-RN
|
1
|
|
Frame
|
Pièce de montage pour série URe
|
1
|
|
Câble
|
Cable 180mm spécifique URe |
1 |
|
Vis
|
WB M3x4
|
4
|
|
WB M6x8
|
6
|
|
WB M3x8
|
6
|
| Outils |
clé 6pans
|
2 types
|
| clé USB |
clé usb spécifique pour robot URe |
1 |
| documentation |
manuel d'utilisation (kickstarter) |
1 |

■ Compatibilité
compatible avec les robots UR de la série e :
UR3e, UR5e, UR10e, UR16e
■ Caractéristiques
|
Microcontrôleur
|
ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit)
|
|
Capteur de position
|
Contactless Absolute Encoder (12bit, 360°)
|
|
Moteur
|
Coreless
|
|
Taux d'Echantillonnage
|
9,600 bps ~ 10.5 Mbps
|
|
Algorithme de Contrôle
|
Contrôle PID |
|
Degré de Précision
|
0.088°
|
|
Modes d'Opérations
|
Mode de contrôle du Courant
Mode de contrôle de position basé sur le courant
|
|
Masse
|
500g
|
|
Course
|
0 ~ 109mm
|
|
Rapport de Transmission
|
1295.7 : 1
|
|
Force développée Maximale
|
170N
|
|
Charge Recommandée
|
5kg
|
|
Température en Opération
|
-5°C ~ 55°C
|
|
Tension Nominale
|
24V
|
|
Signal de Commande
|
Digital Packet
|
|
Type de Protocole
|
Communication Asynchrone en série RS485
(8bit, 1stop, No Parity)
|
|
Connection Physique
|
RS485 Multi Drop BUS
|
|
Identifiant
|
0 ~ 252
|
|
Retour
|
Position, Vitesse, Courant, Température, Input, Voltage, etc
|
|
Materiel
|
Full Metal Gear, Metal Body
|
|
Courant de Veille
|
30mA
|
|
Courant de Pointe
|
3.33A
|
■ Paramètres par Defaut
Identifiant : 1
Vitesse de communication par défaut : 57600bps
■ Liens de téléchargement
e-manuel
■ Numérotation du Modèle
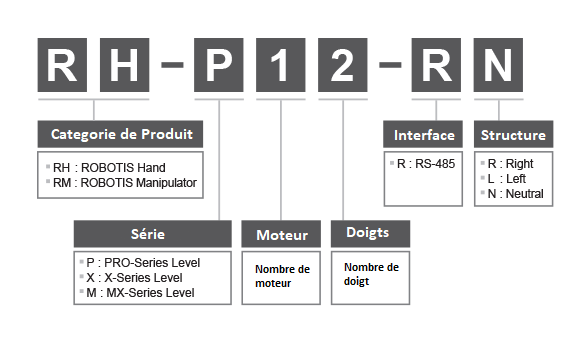
 Agrandir
Agrandir





Nous suivre