La série DYNAMIXEL XC adopte de nouvelles fonctionnalités qui permettent un mode de contrôle à 360 degrés avec son encodeur magnétique sans contact et sa structure d'assemblage de boîtier creux. La série XC a la même structure mécanique que les XM430 et XH430 et est compatible avec les modèles respectifs.
Le XC430 est une version hautes performances du XL430 (DYNAMIXEL d'entrée de gamme), qui peut être appliqué aux robots qui nécessitent un couple plus important.

■ Caractéristiques de Bases
• Conception compacte
• Durabilité et extensibilité améliorées
• Emplacement creux réduisant les contraintes du câble (3 possibiltés de câblage)
• Cadres directement vissés sur le boîtier (pas d'écrous nécessaires)
• Dissipateur de chaleur en aluminium amélioré
• Nombreux modes de fonctionnement
• Contrôle de profil pour la planification de mouvement lisse
• Données de trajectoire et état de déplacement (en position, suite à une erreur, etc.)
• Moins énergivore (Courant de veille réduit de 100mA à 40mA)
■ Différentes possibilités de Câblage

■ Comparaison des performances

■ Contenu du Kit
|
Description
|
Quantité
|
|
DYNAMIXEL
|
XC430-W150-T
|
1
|
|
Palonnier
|
HN11-N101 (assemblé)
|
1
|
|
Câble
|
Robot Cable-X3P 180mm
|
1
|
|
Boulon/Ecrou
|
Boulon (WB M2.6*5) TAP
|
5
|
|
Boulon (WB M2*5)
|
5
|
|
Boulon (PHS M2.5*15)
|
5
|
|
divers
|
Spacer ring (entretoise)
|
1
|
■ Caractéristiques
| Modèle |
XM430-W210-T
|
|
Masse (g)
|
65g
|
|
Dimension (mm)
|
28.5 x 46.5 x 34
|
|
Rapport de Transmission
|
159.59 : 1
|
|
Tension d'alimentation (V)
|
9
|
11.1
|
12
|
|
Couple de décrochage (N.m)
|
1.2
|
1.4
|
1.6
|
|
Courant de décrochage (A)
|
1.1
|
1.3
|
1.4
|
|
Vitesse à Vide (RPM)
|
80
|
99
|
106
|
|
|
|
Microcontrôleur
|
ST CORTEX-M3 (72MHZ,32BIT)
|
|
Capteur de position
|
Codeur absolu sans contact (12BIT,360°) by AMS
|
|
Moteur
|
Coreless Motor
|
|
Resolution
|
0.088° x 4,096 steps
|
|
Gamme d'opération
|
Mode de contrôle par vitesse : Rotation infinie
Mode de contrôle par position : 360[deg]
Mode de contrôle par étendu: ±256[rev]
Mode de contrôle par PWM : Rotation infinie
|
|
Tension d'entrée (V)
|
6.5~14.8V (Tension recommandée : 12V)
|
|
Température en fonctionnement
|
-5°C ~ 80°C
|
|
Signal de commande
|
Digital Packet
|
|
Type de Protocole
|
Half duplex Asynchronous Serial Communication (8bit,1stop, pas de parité)
|
|
Lien (physique)
|
TTL Level Multi Drop Bus
|
|
Identifiant
|
253 ID (0~252)
|
|
Vitesse de communication
|
9600 bps ~ 4.5 Mbps
|
|
Données accesibles
|
Position, Vitesse, Charge, Realtime tick, Trajectoire, Temperature, Tension d'entrée, etc.
|
|
Matériel
|
Caisson : métallique (avant, milieu)
Plastique Technique (arrière)
Engrenage : intégralement métallique
|
|
Courant de Veille (mA)
|
46
|
■ Paramètres par Défaut
Identifiant : 1
vitesse de communication : 57600bps
* Après achat faire les modifications d'ID, vitesses de communication, etc.
** Interface PC : USB2Dynamixel ou son successeur l'U2D2 (ref : 902-0132-000) pour changer cette vitesse et ID facilement.
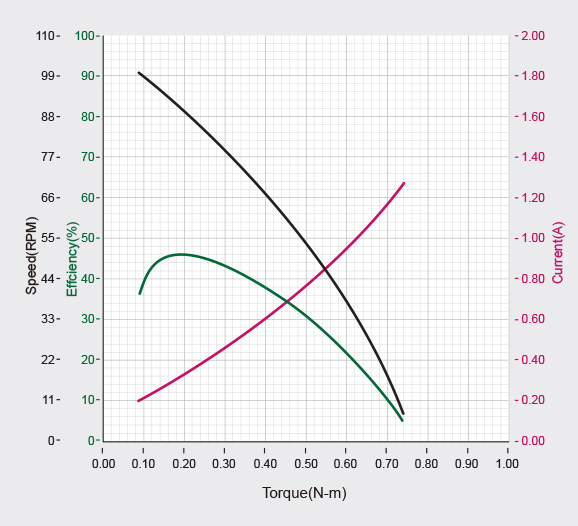
■ graphique des performances
■ Hyperliens
Charte de compatibilité du cadre, des roulements, du pallonier : Cliquer ici
Charte de compatibilité du Contrôleur : Cliquer ici
Plans mécaniques, SDK, logiciels : cliquer ici
E-Manual : Cliquer ici
■ Avertissement
La serie DYNAMIXEL X adopte un nouveau connecteur JST plaqué or pour des communications fiable et sécurisées.
Pour contrôler la série de servo moteur DYNAMIXEL X via OpenCM ou USB2Dynamixel, utilisez le câble convertible JST-Molex fourni dans le kit.
Pour plus d'informations référez vous à la page compatibilité.
|
Contrôleur / Interface
|
Cable
|
Dynamixel X
|
|
Modèle
|
Support Connecteur :
|
Supports Connectors :
|
Communication
|
|
OpenCM+485 Expansion Board
|
Molex (3P, 4P)
|
Robot Cable-X3P 180mm (Convertible)
|
JST-3P
|
TTL
|
|
USB2Dynamixel
|
|
OpenCR1.0
|
JST (3P, 4P)
|
Robot Cable -X3P (by length)
|
|
U2D2
|
|
OpenCM+485 Expansion Board
|
Molex (3P, 4P)
|
Robot Cable -X4P 180mm (Convertible)
|
JST-4P
|
RS-485
|
|
USB2Dynamixel
|
|
OpenCR1.0
|
JST (3P, 4P)
|
Robot Cable -X4P (by length)
|
|
U2D2
|

 Agrandir
Agrandir




Nous suivre